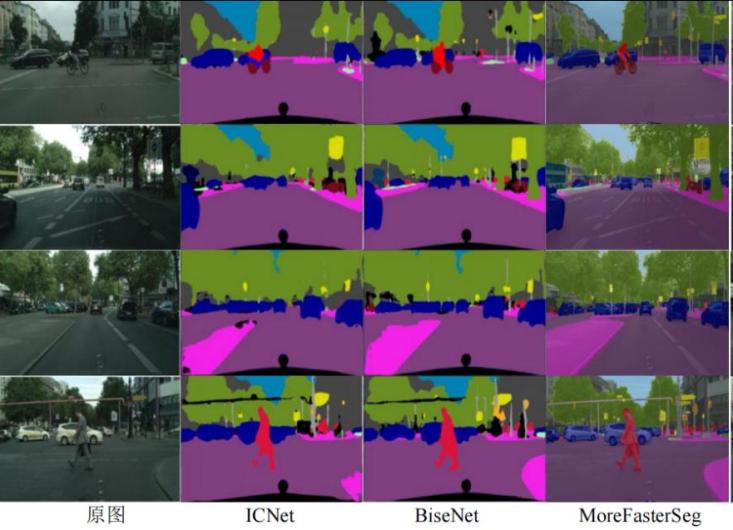
(1)An Efficient Semantic Segmentation Network Based on Neural Architecture Search
針對(duì)移動(dòng)機(jī)器人導(dǎo)航系統(tǒng)對(duì)復(fù)雜場(chǎng)景理解的高性能需求,提出了一種魯棒快速語(yǔ)義分割網(wǎng)絡(luò),在公開的室外環(huán)境數(shù)據(jù)集上進(jìn)行了對(duì)比評(píng)估實(shí)驗(yàn),方法具有良好的魯棒性,,不僅有效提升目標(biāo)物體的語(yǔ)義分割精度,,而且取得良好的實(shí)時(shí)性,。研究成果對(duì)提升移動(dòng)機(jī)器人系統(tǒng)對(duì)復(fù)雜室外環(huán)境的理解能力具有實(shí)際應(yīng)用價(jià)值,研究成果“An Efficient Semantic Segmentation Network Based on Neural Architecture Search”2022年發(fā)表在EAAI期 刊上(中科院一區(qū),,IF=7.802),。
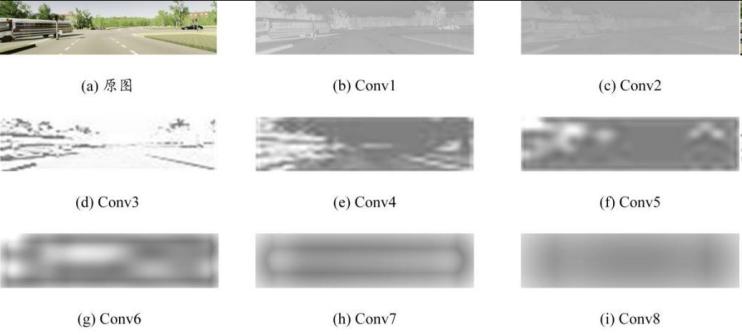
(2)Learning Invariant Semantic Representation for Long-term Robust Visual Localization
針對(duì)移動(dòng)機(jī)器人長(zhǎng)期導(dǎo)航面臨復(fù)雜環(huán)境中變化因素的挑戰(zhàn)問(wèn)題,提出學(xué)習(xí)型不變語(yǔ)義描述符并將其應(yīng)用于語(yǔ)義定位,,并在多個(gè)公開的數(shù)據(jù)集上對(duì)方法的性能進(jìn)行了驗(yàn)證,,數(shù)據(jù)集包括不同的天氣、植被情況,、區(qū)域和光照條件,,實(shí)驗(yàn)證明了方法在復(fù)雜環(huán)境中視覺(jué)定位性能優(yōu)于目前代表性的SoTA方法,這一研究進(jìn)展對(duì)增強(qiáng)機(jī)器人對(duì)變化環(huán)境的自適應(yīng)能力具有良好的實(shí)用價(jià)值,,研究成果“Learning Invariant Semantic Representation for Long-term Robust Visual Localization”2022年發(fā)表在EAAI期刊上(中科院一區(qū),,IF=7.802)。
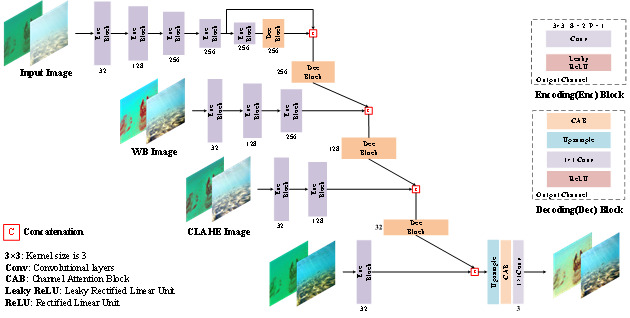
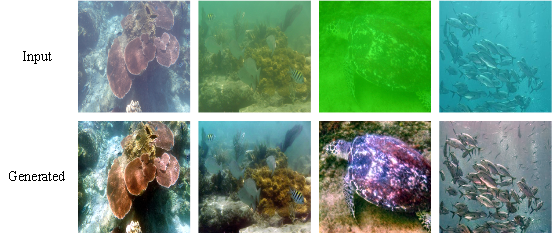
(3)FW-GAN: Underwater Image Enhancement using Generative Adversarial Network with Multi-Scale Fusion
針對(duì)水下機(jī)器人導(dǎo)航時(shí)面臨的圖像顏色失真,、對(duì)比度低和可見度低等問(wèn)題為生成器額外提供對(duì)應(yīng)緩解以上問(wèn)題的先驗(yàn)特征,,基于對(duì)抗生成網(wǎng)絡(luò)提出了水下圖像融合增強(qiáng)網(wǎng)絡(luò)模型,提出使用多尺度融合連接,,通過(guò)注意力特征聚合使模型可以融合先驗(yàn)方法的優(yōu)勢(shì)進(jìn)而預(yù)測(cè)出高質(zhì)量的增強(qiáng)結(jié)果,。在 Linux 環(huán)境下使用Pytorch實(shí)現(xiàn)了該方法并在公開數(shù)據(jù)集上驗(yàn)證了方法的優(yōu)越性,性能領(lǐng)先于近三年發(fā)表在頂會(huì)頂刊的同類型工作,。研究成果2022年8月發(fā)表在Signal Processing: Image Communication國(guó)際知名學(xué)術(shù)期刊上(中科院二區(qū),,IF=3.453)。
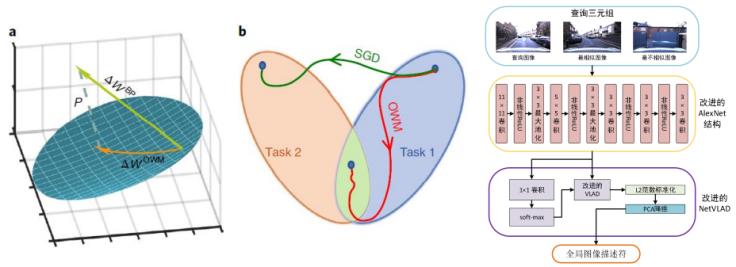
(4)Cross-scene Loop-closure Detection with Continual Learning for Visual SLAM
在解決大范圍環(huán)境中機(jī)器人導(dǎo)航學(xué)習(xí)的災(zāi)難性遺忘問(wèn)題方面,,對(duì)SLAM特征學(xué)習(xí)的卷積層運(yùn)算過(guò)程進(jìn)行了優(yōu)化設(shè)計(jì),,提出一種具有跨場(chǎng)景連續(xù)學(xué)習(xí)能力的魯棒性回環(huán)檢測(cè)方法,以有效增強(qiáng)SLAM的魯棒性,。該方法克服了視覺(jué)SLAM學(xué)習(xí)型回環(huán)檢測(cè)方法的災(zāi)難性遺忘問(wèn)題,使其具有了終生連續(xù)學(xué)習(xí)能力,,同時(shí)還提出了一套可以評(píng)估視覺(jué)SLAM回環(huán)檢測(cè)連續(xù)性學(xué)習(xí)能力的方法,。與現(xiàn)有的SLAM方法相比,本方法使得SLAM擁有了明顯的連續(xù)學(xué)習(xí)能力,,對(duì)變化環(huán)境(包括:光照變化,、場(chǎng)景內(nèi)容變化等)具有更強(qiáng)的適應(yīng)能力,該方法為服務(wù)機(jī)器人在更廣的應(yīng)用領(lǐng)域長(zhǎng)時(shí)間大范圍區(qū)域進(jìn)行SLAM提供了有價(jià)值的應(yīng)用依據(jù),。研究成果2021年發(fā)表在Journal of Advanced Robotic Systems期刊上(中科院四區(qū),,IF=1.714)。

 1164
1164
 2
2
 0
0
 2022-09-13 22:11:10
2022-09-13 22:11:10
 2022-09-21
2022-09-21




載")
贊")
